Simulador 3D Interativo¶
Objetivo desta página¶
Mostrar, no próprio GitHub Pages, uma demonstração visual 3D do protótipo de compactação em rota (conceito Terranimo/Softsoil em implementação aberta e simplificada).
Demonstração interativa (HTML)¶
Abrir visualizador 3D em nova aba
Caso o bloco interativo não carregue na sua rede/navegador, use o link “Abrir visualizador 3D em nova aba”.
Figuras de apoio¶
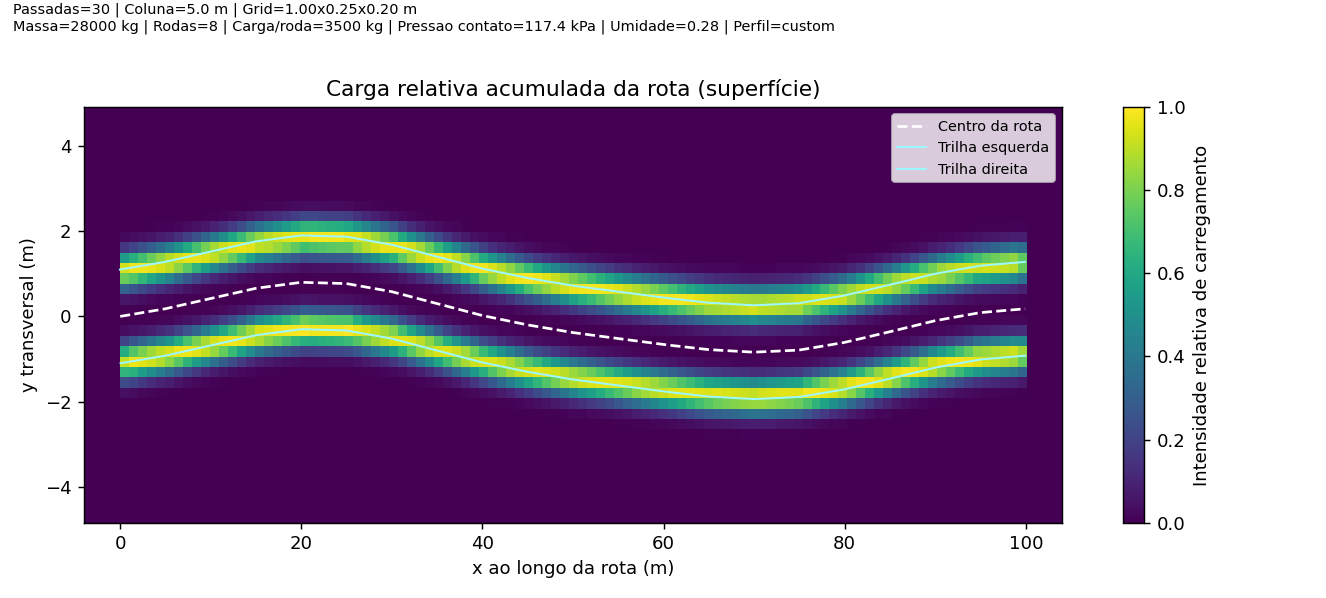
Fig. 1 Mapa de intensidade relativa de carregamento na superfície para a rota amostrada.¶
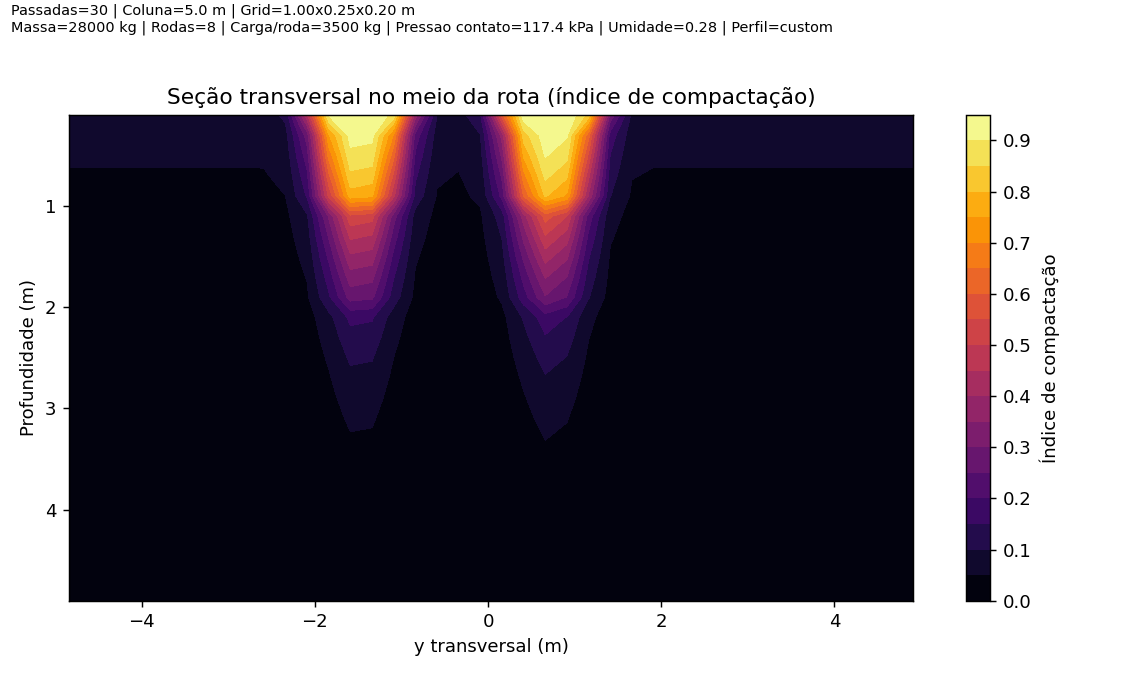
Fig. 2 Seção y-z no meio da rota, mostrando a distribuição de compactação com a profundidade.¶
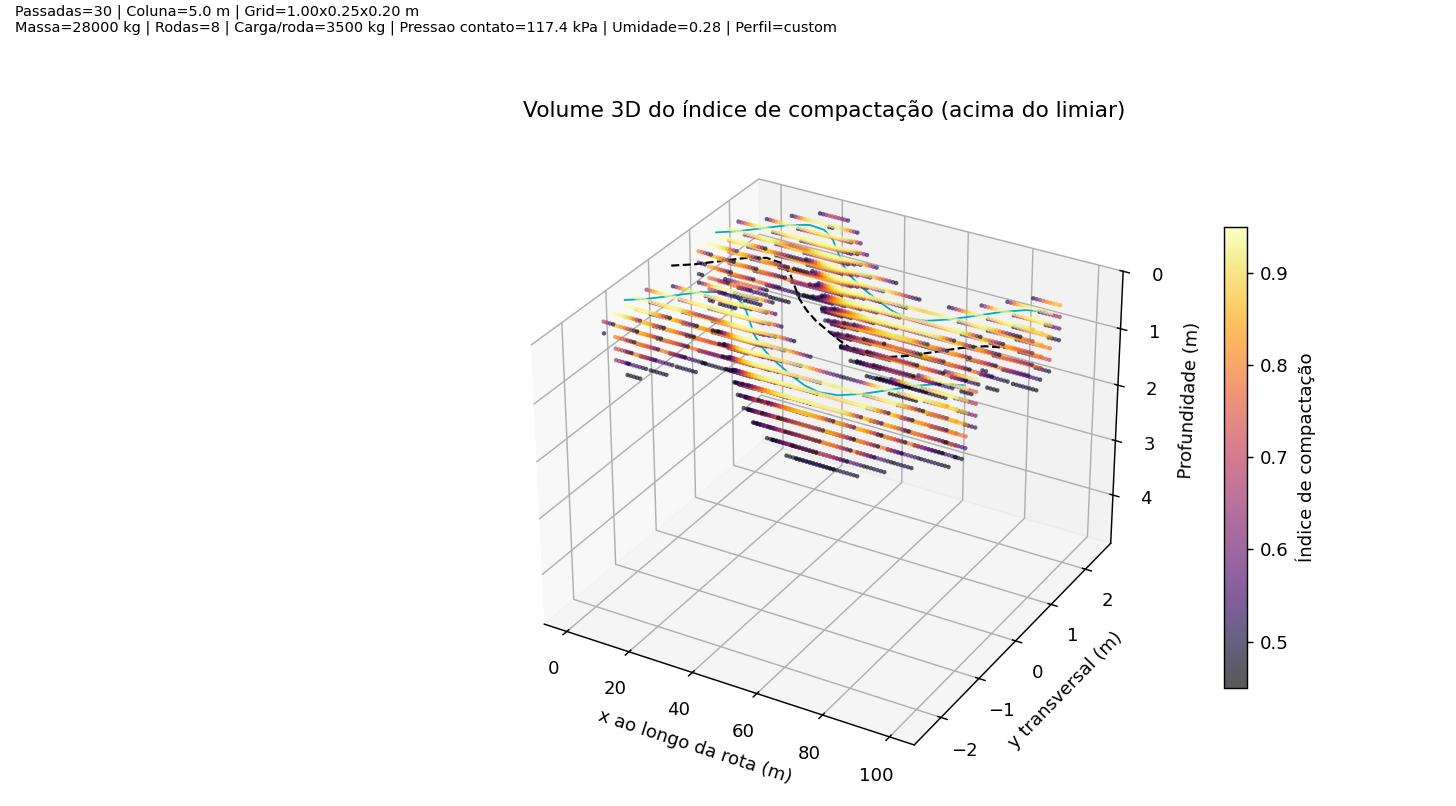
Fig. 3 Versão estática do volume 3D (pontos acima de limiar de compactação).¶
Parâmetros do cenário de demonstração¶
passes |
depth_m |
mass_kg |
wheels |
wheel_load_kg |
tire_width_m |
contact_length_m |
track_gauge_m |
contact_pressure_kpa |
moisture |
soil_profile |
sigma_crit_surface_kpa |
sigma_crit_gradient_kpa_m |
sigma_crit_layers |
route_mode |
route_csv |
route_sine_amplitude_m |
route_sine_wavelength_m |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
30 |
5.0 |
28000.0 |
8 |
3500.0 |
0.65 |
0.45 |
2.2 |
117.38461538461537 |
0.28 |
custom |
110.0 |
35.0 |
0.30:95,1.00:140,2.00:210,5.00:290 |
csv |
data/exemplo_rota_rtk.csv |
1.2 |
30.0 |
Comando usado para gerar este cenário¶
python3 src/prototipo_trajeto_3d.py \
--route-mode csv \
--route-csv data/exemplo_rota_rtk.csv \
--soil-profile custom \
--sigma-crit-layers "0.30:95,1.00:140,2.00:210,5.00:290" \
--output-dir sphinx/_static/resultados/prototipo_trajeto_3d_demo